<center></center>
**1.1.1 Definition of Control System**
Everyone hopes to achieve a specific purpose, and this is no different from systems. Every system is designed to achieve a specific purpose. For example, a lighting system is designed to provide illumination and a heating/cooling system is designed to control the temperature of an area. From this, we can define Control System as systems that ensure that specialized systems function as intended. A book-ish definition of a control system is:
<center> A control system is a system that manages/controls the behavior of other devices</center>
The need for control is as a result of the uncertainty inherent from the dynamic nature of system operations. These uncertainties almost always result from disturbance sources such as unforeseen events, noises which are added to the system during operation. Also since no model can precisely represent any physical system, a significant source of uncertainty is from the model used to represent the system. The design and implementation of a control system incorporate the following steps:
* **Modelling:** the system is modeled using mathematical equations
* **Analysis:** the mathematical model is then analyzed using various mathematical tools to ensure that the model is error-free
* **Design:** the mathematical model is then used to design the control system
* **Implementation:** the physical system is implemented and then tested.
The process of Control involves the following steps:
* **Reference:** a reference signal that determines what is expected from the output of the system to be placed under control is set
* **Detection:** the output of the system under control is detected
* **Comparison:** the output which was detected is then compared with the reference value to generate an error value
* **Generation:** after the error value has been gotten, an appropriate input is generated for the system under control to produced the specified and desired output.
**1.1.2 Examples of Control Systems**
Examples of Control Systems include automatic toaster control system, alarm clock systems, guided missile control systems, automatic braking systems, power steering systems, conditioning systems, smart engines, internet, robots, elevator control systems, flight control systems, human body systems, and fluid level control systems.
Let us illustrate how control is achieved by using a simple elevator control system.
Consider a building with an elevator (See Figure 1.1), which has a control panel that is located on the elevator.
<center>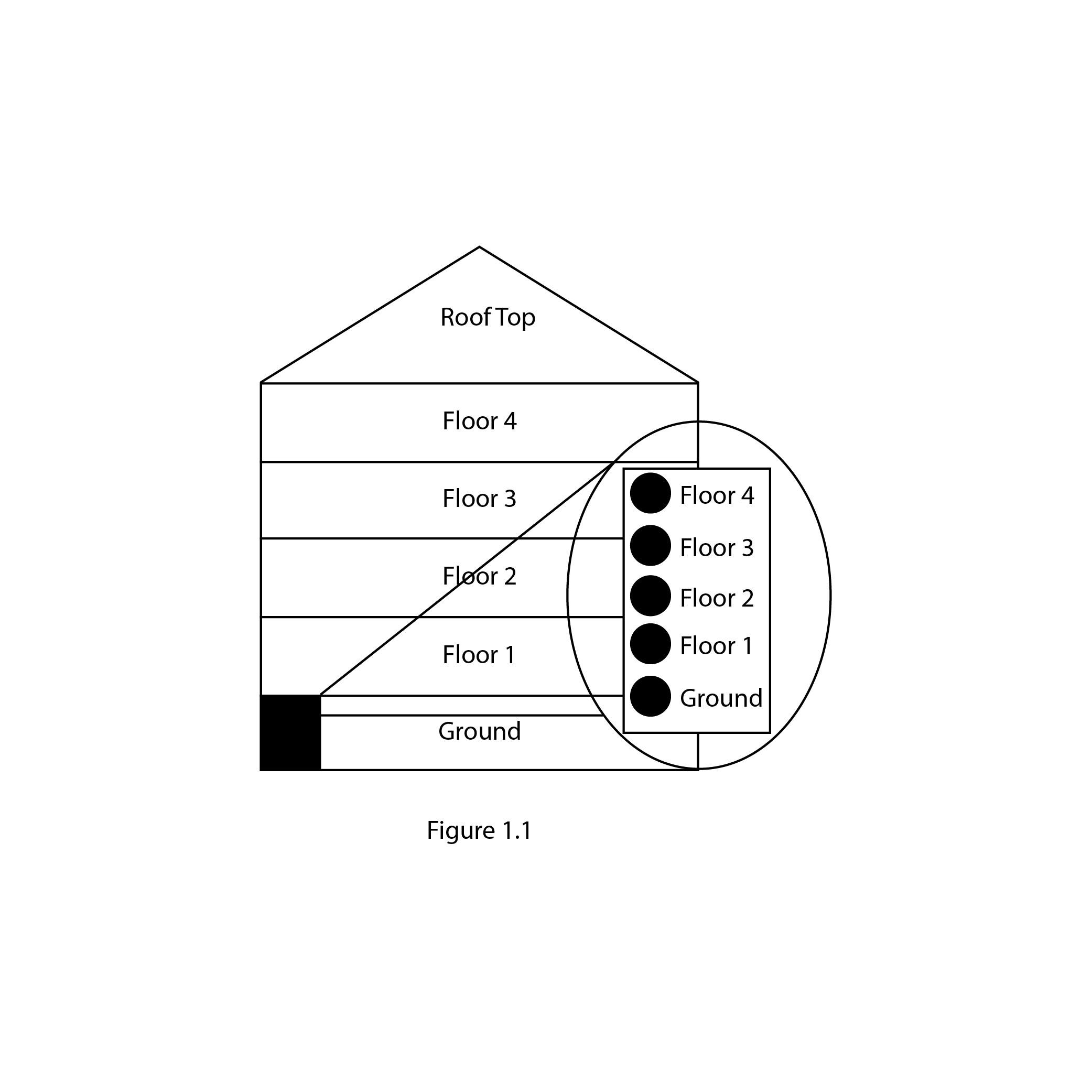</center>
If the output Y(t), is chosen to be a function that depends on the height of the elevator ‘a’, from a fixed position as shown in Equation 1.1
<center> Y(t) = aF(t) (1.1) </center>
then the reference input R(t), is set by pushing a button located on the elevator’s control panel. This reference input is equivalent to the value of Y(t) computed a t a predetermined value of ‘a’ that corresponds to the height of the appropriate floor from the reference position. As an example, if the fourth floor is the desired output, button 4 on the control panel is pushed. This would result in a reference input signal given by Y(t) = a4F(t). The error input signal is then computed from the actual position of the elevator and the desired position as in Equation 1.2
<center> e(t) = (a4F(t)) – (aF(t)) (1.2) </center>
**1.1.3 Classification of Control System**
Control Systems can be classified by a number of criteria, but three commonly used classification are:
* Open-loop system or closed-loop system
* Analog control system or digital control system
* Active control system or passive control system
* **Open-loop/Closed-loop Control Systems**
An open-loop control system is the one whose control action is independent of the output of the system, as shown in figure 1.2.
<center>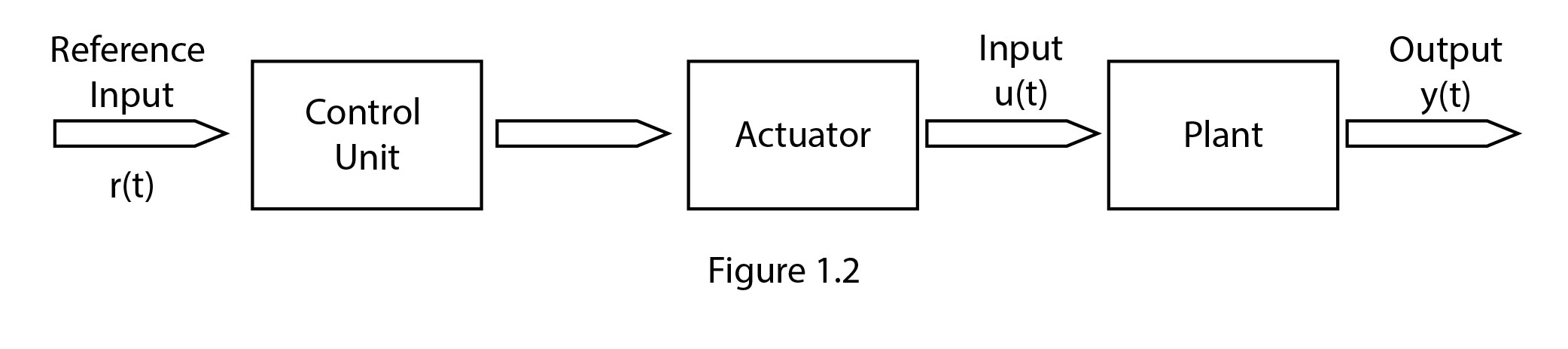</center>
Open-loop control uses prior knowledge of system dynamics to compute appropriate inputs. Thus, open-loop control has the inherent disadvantage that very accurate model of the system to be controlled is required. A closed-loop control system is a system whose control action is dependent on the output of the system as shown in Figure 1.3
<center>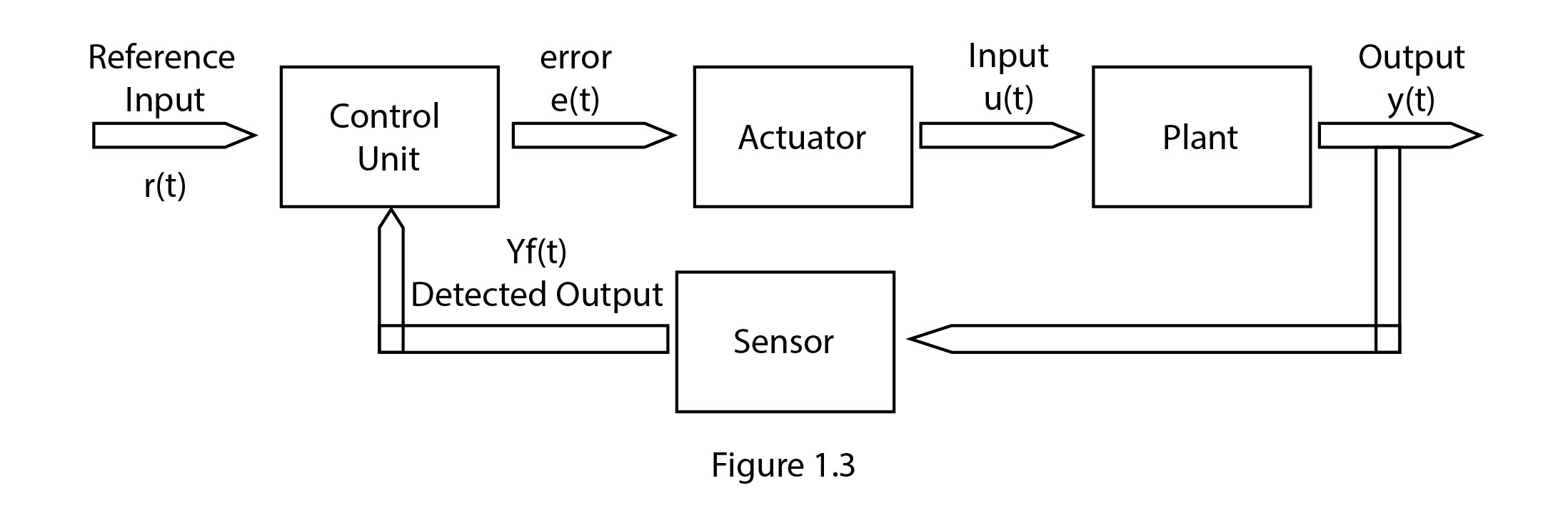</center>
Based on the specific purpose of the control unit, it can be classified as either:
* **Controller:** This is a control system that manages the behavior of other devices and systems
* **Compensator:** this is a control system that regulates other systems, usually by conditioning the input or output of the system. Compensators are usually used to correct system properties that are outside of a proper operating range. Most commonly, the phase characteristics are in need of compensation, especially if the magnitude response is to remain constant.
* **Analog/Digital Control Systems**
An analog control system is a system that works with continuous time signals while a digital control system is a system that works with discrete-time signals.
* **Active/Passive Control Systems**
Passive control systems are those that employ a change in system structure to change the dynamics of the system under control while Active control systems are those that employ sensors and actuators connected to a computing device to modify the dynamics of the system under control. Active Control has the advantage that uncertainty and noise can be taken into account during system implementation. Evidently, from the preceeding statements, active control presents a more realistic option than passive control. Nonetheless, passive control should be used when it offers viable options such as cheapness and robustness.
**1.2 Control Theory**
Control Theory is simply the theory of methodologies for the design and analysis of control systems. There are two major ones:
* The Classical methods
* The modern methods
In both methods, the aim is to make the output y(t) of the system under control to behave in a desirable fashion, which is set by the reference signal r(t). Thus the system designer and/or analyst needs to have information about the system so that meaningful deduction about the nature of the system under control can be made. Hence, both methods model the system using tools that provide visual and mathematical information about the system.
**1.2.1 Classical Control Theory**
Physical systems are naturally modeled in the time-domain where the response of a given system is a function of the various inputs, the previous systems values, and time. As time progresses, the state of the system, and it’s response change. However, time-domain models for systems are frequently modeled using high-order differential equations, which are difficult to solve. To solve this problem, transforms such as Laplace transform, Z-transform and the Fourier transform are employed to change the high-order differential equations in the time domain into simpler equations in the transformed domain. The classical approach employs the transfer function (Equation 1.3) of the system to the input of the system to solve the high-order differential equation problem.
<center>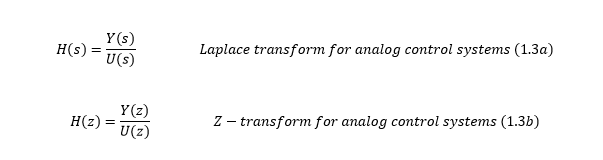</center>
The advantage of representing the systems in a transform domain becomes evident when you compare the expression for the transfer function in the transfer domain and the expression in the time domain. As an example, a transfer function of a control system in the Laplace domain is given in Equation 1.4
<center>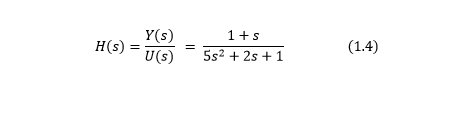</center>
The same input-output relationship can be expressed by the ordinary differential equation (ODE) in Equation 1.5 in the time domain by expanding the equation and taking the inverse Laplace transform.
<center>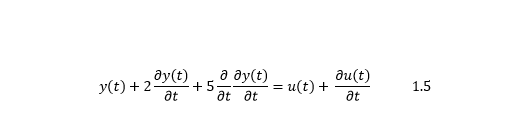</center>
As can be observed from Equations 1.4 and 1.5, the transfer function in the Laplace domain presents an easier problem than the ODE in the time domain.
**1.2.2 Modern Control Theory**
Modern methods, instead of changing domains to avoid complexities of time-domain mathematics, convert the high-order differential equations into a system of lower-order time-domain equations (usually first order equations), which can then be manipulated using techniques from linear matrix algebra, thus avoiding the added complexity of transforming from one domain to another.
<center>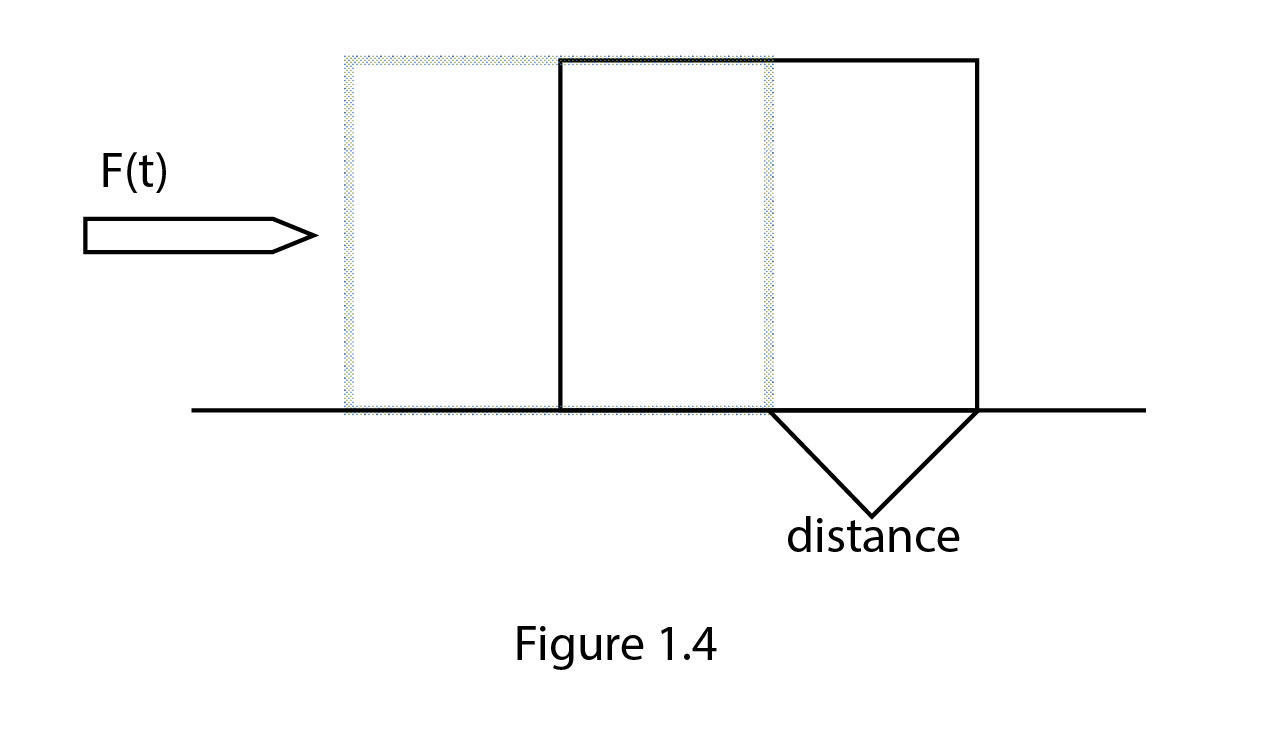</center>
Figure 1.4 shows a force f(t) being applied to a body of mass m causing the body to move through a distance s(t). As a result the body gains an acceleration that is related to the input force by
<center></center>
As can be observed from equation 1.6, this is a second order equation that can be reduced to the two first order equations show in equation 1.
<center></center>
**1.3 Important Topics in Control Theory**
**1.3.1 Performance:**
The performance of a system refers to the quality of the desired response from a system. It is generally divided into:
* **Steady-state performance:** this talks about the accuracy of the system
* **Transient performance:** this talks about the speed of the response of the system
The performance analysis of a control system is concerned with the optimal operations of the system.
**1.3.2 Stability**
Stability is one of the most important topics in engineering. It refers to the characteristics of the system to:
* Remain at rest when under no excitation
* Return to rest when an excitation that caused the system to leave its rest state has been removed
**1.3.3 Robustness**
The study of system robustness aims to ensure that systems remain stable even in the presence of unknown or unforeseen events. In other words, the goal is to design systems whose operations are fairly insensitive to small variations of its operational parameters. The sensitivity of a system measures how much change in output is caused by small changes to the system parameters. Sensitive systems have very large changes in output in response to small changes in operational parameters.
Stay tuned for Control System Pt. 2.