### **I. Introduction**
<center>
</center>
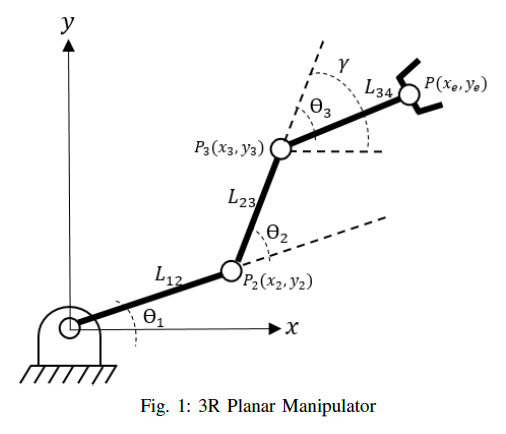
The mathematical modeling of the kinematics of a 3R planar manipulator involved in identifying the end-effector position or the joint angles. The 3R planar manipulator has three revolute joint and three links, as shown in Figure 1. The robot forward kinematics yields the end-effector position and its orientation from the given link lengths and joint angles. On the contrary, the robot inverse kinematics finds the joint angles from the given end-effector and its orientation.
The position of the robot end-effector is denoted by P as
<center></center>
and its orientation relative to the world x-axis is denoted *γ*. The robot joint angles are denoted θ<sub>i</sub>. The trigonometric functions, sine and cosine, are used extensively in the text so the following notations are introduced.
<center> </center>
This notation is also extended to sums as
<center></center>
Link lengths are the distances between the joints and denoted as *L*<sub>ij</sub> , where *i* is the joint number closer to the base and *j* is the joint number to the end-effector. In this text, we derived equations for the forward and inverse kinematics of a 3R planar manipulator, in accordance to the earlier notations. Also, we create *fkinematics* and *ikinematics* functions in MATLAB for forward and inverse kinematics of 3R planar manipulator respectively, and evaluate it by comparing the result of each function.
### **II. METHODS**
#### **A. Forward Kinematics**
The robot forward kinematics calculates the end-effector position and orientation given the joint angles and link lengths. The end-effector position is define by
<center>

</center>
where θ comprises the joint angles and L is made up of all the link lengths. Also,
<center>

</center>
We derived the joint angles using the trigonometric relations in a right triangle. The joint positions are
<center>
</center>
We take the vector sum of all the joint position and yield the forward kinematic equation for 3R planar manipulator as
<center>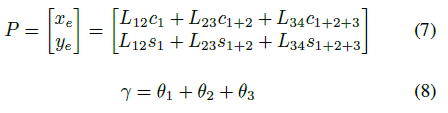
</center>
#### **B. Reverse Kinematics**
<center>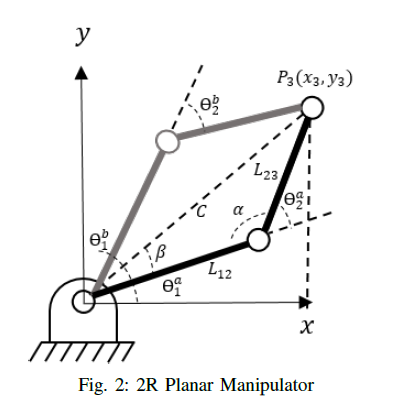
</center>
Robot reverse kinematics is a more useful study because the end-effector position is known. In reverse kinematics problem, the task is to find the joint angles given position *p*, orientation *γ*, and the link lengths. Initially, we solve the position of *P3* and get
<center>  </center>
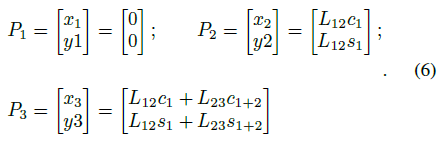
Hence *P3* is obtained by equation 7, the joint angles *θ*<sub>1</sub> and *θ*<sub>2</sub> are given by a 2R inverse kinematics problem with *P3* as the end-effector, as shown in Figure 3. We solve the angles *α* and *β* as
<center>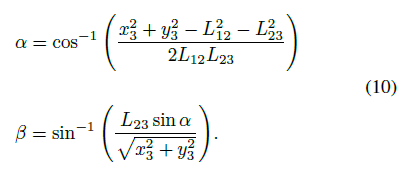</center>
These angles are used to determine the joint angles *θ*<sub>1</sub> and *θ*<sub>2</sub>. We keep in mind that there are two set of solution for the joint angles in 2R inverse kinematics problem. We refer joint 3 as the wrist, and joint 2 as the elbow. We compute the joint angles *θ*<sub>1</sub> and *θ*<sub>2 </sub> by considering the elbow-up and elbow-down configuration, as shown in Figure 2, in reference to wrist angle *θ*<sub>3</sub>.
<center>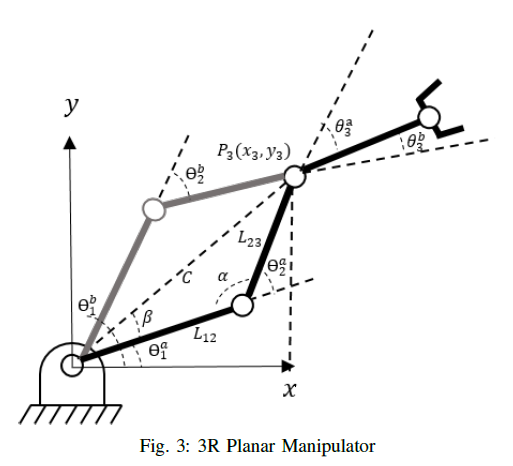</center>
The joint angles *θ*<sub>1</sub> and *θ*<sub>2</sub> are
<center>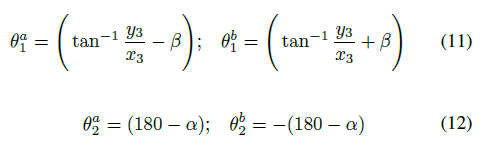</center>
The wrist angles, *θ*<sub>3</sub>, are
<center>
</center>
The a and b notation denotes the elbow-up and elbow-down configuration respectively. The joint and wrist angles are shown in Figure 3.
#### **C. MATLAB Implementation**
We implement the equations for the forward and inverse kinematics of a 3R planar manipulator in MATLAB. We create a *fkinematics* and *ikinematics* function for forward and inverse kinematics respectively. The *fkinematics* function accept the link lengths and the joint angles. It returns the end-effector position and orientation. Also, a plot of the 3R planar manipulator and its end-effector point is displayed. The script used for *fkinematics* is shown in listing 1.
```
function fkinematics(links1,links2,links3,theta1,theta2,theta3)
% Forward kinematics for 3-Link Planar Manipulator
% Inputs:
% links1,links2,links3 are length of each links in the robotic arm
% base is the length of base of the robotic arm
% theta1,theta2,theta3 are joint angles in reference to x-axis
format compact
format short
L12 = links1;
L23 = links2;
L34 = links3;
J1 = theta1;
J2 = theta2;
J3 = theta3;
%joint equation
x2 = L12*cosd(J1);
x3 = L23*cosd(J1+J2)+ x2;
xe = L34*cosd(J1+J2+J3) + x3;
y2 = L12*sind(J1);
y3 = L23*sind(J1+J2)+ y2;
ye = L34*sind(J1+J2+J3) + y3;
gamma = J1+J2+J3;
fprintf('The position of the end-effector is (%f, %f) and orientation is(%f)\n',xe,ye,gamma)
%plotting the links
r = L12 + L23 + L34;
daspect([1,1,1])
rectangle('Position',[-r,-r,2*r,2*r],'Curvature',[1,1],...
'LineStyle',':')
hold on
axis([-r r -r r])
line([0 x2], [0 y2])
line([x2 x3],[y2 y3])
line([x3 xe],[y3 ye])
line([0 0], [-r/10 r/10], 'Color', 'r')
line([-r/10 r/10], [0 0], 'Color', 'r')
hold on
plot([0 x2 x3],[0 y2 y3],'o')
plot([xe],[ye],'o','Color','r')
grid on
xlabel('x-axis')
ylabel('y-axis')
title('Forward Kinematics 3-Link Planar Manipulator')
end
```
<center>Listing 1: Forward Kinematics implementation (fkinematics function)</center>
We set the link lengths, the end-effector position, and orientation as the input for the *ikinematics* function. The function returns the joint angles and a plot showing the 3R planar manipulator. Hence the inverse cosine yields to either a real or complex value, we set a conditional statement in the script so that inverse cosine would return a real-valued angle. The script used for *ikinematics* is shown in listing 2.
```
function ikinematics(links1, links2, links3, positionx, positiony, gamma)
% Inverse kinematics for 3-Link Planar Manipulator
% Inputs:
% links1,links2,links3 are length of each links in the robotic arm
% base is the length of base of the robotic arm
% positionx,positiony are joint angles in reference to x-axis
% gamma is the orientation
format compact
format short
L12 = links1;
L23 = links2;
L34 = links3;
xe = positionx;
ye = positiony;
g = gamma;
%position P3
x3 = xe-(L34*cosd(g));
y3 = ye-(L34*sind(g));
C = sqrt(x3^2 + y3^2);
if (L12+L23) > C
%angle a and B
a = acosd((L12^2 + L23^2 - C^2 )/(2*L12*L23));
B = acosd((L12^2 + C^2 - L23^2 )/(2*L12*C));
%joint angles elbow-down
J1a = atan2d(y3,x3)-B;
J2a = 180-a;
J3a = g - J1a -J2a;
%joint angles elbow-up
J1b = atan2d(y3,x3)+B;
J2b = -(180-a);
J3b = g - J1b - J2b;
fprintf('The joint 1, 2 and 3 angles are (%f,%f, %f) respectively for elbow-down configuration.\n',J1a,J2a,J3a)
fprintf('The joint 1, 2 and 3 angles are (%f,%f, %f) respectively for elbow-up configuration.\n',J1b,J2b,J3b)
else
disp(' Dimension error!')
disp(' End-effecter is outside the workspace.')
return
end
x2a = L12*cosd(J1a);
y2a = L12*sind(J1a);
x2b = L12*cosd(J1b);
y2b = L12*sind(J1b);
r = L12 + L23 + L34;
daspect([1,1,1])
rectangle('Position',[-r,-r,2*r,2*r],'Curvature',[1,1],...
'LineStyle',':')
line([0 x2a], [0 y2a],'Color','b')
line([x2a x3], [y2a y3],'Color','b')
line([x3 xe], [y3 ye],'Color','b')
line([0 x2b], [0 y2b],'Color','g','LineStyle','--')
line([x2b x3], [y2b y3],'Color','g','LineStyle','--')
line([x3 xe], [y3 ye],'Color','b','LineStyle','--')
%line([0 xe], [0 ye],'Color','r')
line([0 0], [-r/10 r/10], 'Color', 'r')
line([-r/10 r/10], [0 0], 'Color', 'r')
hold on
plot([0 x2a x3],[0 y2a y3],'o','Color','b')
plot([x2b],[y2b],'o','Color','g')
plot([xe],[ye],'o', 'Color', 'r')
grid on
xlabel('x-axis')
ylabel('y-axis')
title('Inverse Kinematics 3-Links Planar Manipulator')
end
```
<center>Listing 2: Inverse Kinematics implementation (ikinematics function)</center>
### **III. Result and Discussion**
<center>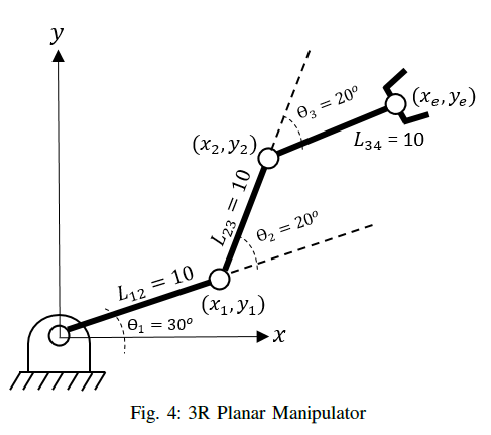</center>
#### *A. Forward Kinematics*
In this section, we evaluate the forward and inverse kinematics equations of a 3R planar manipulator. We substitute the values shown in Figure 4 in the fkinematics. In the Matlab window console, we run
```
fkinematics(10,10,10,30,20,20)
```
and yield to the end-effector position, *(x*<sub>e</sub> *= 18.508332, y*<sub>e</sub> *= 22.057371)* and orientation, *(γ = 70.00)*. Figure 5 shows the 3R planar manipulator.
<center>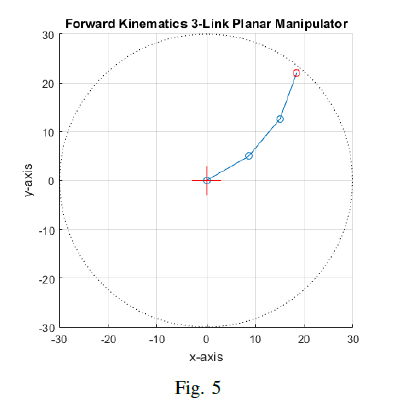
</center>
The end-effector position and its orientation from the *fkinematics* is set as an input to *ikinematics* to evaluate it. The function must yield the joint angles shown in Figure 4. We run
```
ikinematics(10,10,10,18.508332,22.057371,70)
```
and we yield the following joint angles for elbow-down configuration are *θ*<sub>1</sub> *= 30.000009*, *θ*<sub>2</sub> *= 19.999981*, and *θ*<sub>3</sub> *= 20.000009*. Hence the inverse kinematics has two set of unique solution, we have the joint angles for elbow-up configuration as *θ*<sub>1</sub> *= 49.999991*, *θ*<sub>2</sub> *= −19.999981*, and *θ*<sub>3</sub> *= 39.999991*.
<center>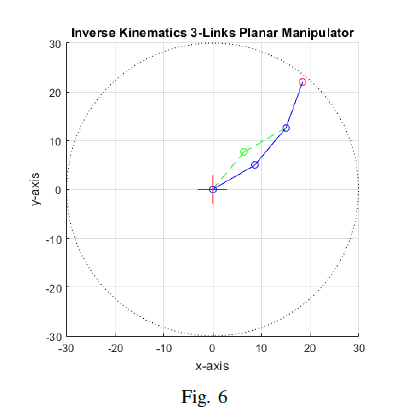
</center>
Thus, we verified that the forward kinematics equations which yields to a correct end-effector position and its orientation.
<center>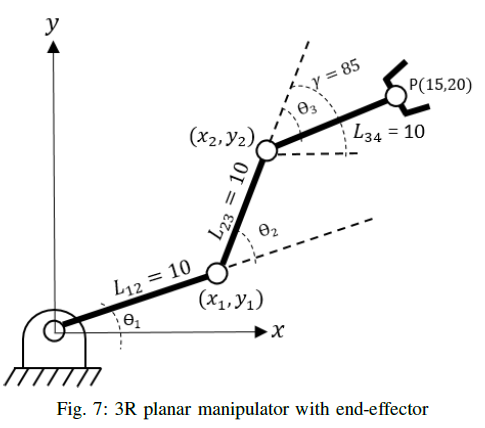</center>
#### **B. Inverse Kinematics**
Figure 7 shows a 3R planar manipulator with an identified end-effector position and its orientation. We use *ikinematics* function in MATLAB to generate the joint angles. Then, we evaluate the result by substituting it as an input to *fkinematics* function. In the Matlab window console, we run
```
ikinematics(10,10,10,15,20,85)
```
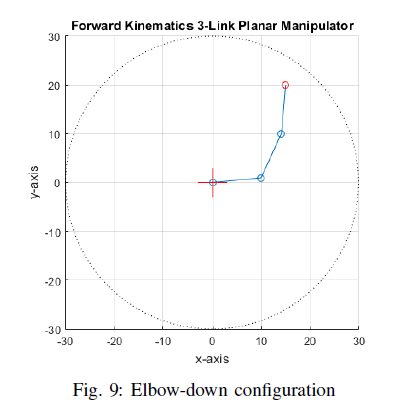
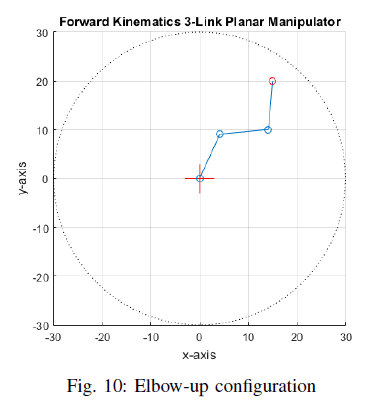
and yield a joint angle for elbow-down configuration as *θ*<sub>1</sub> *= 5.455370, θ* <sub>2</sub> *= 59.875741, θ*<sub>3</sub> *= 19.668889* while for elbow-up configuration as *θ*<sub>1</sub> *= 65.331111, θ*<sub>2</sub> *= −59.875741, θ*<sub>3</sub> *= 79.544630*. Figure 9 shows the 3R planar manipulator plot for the end-effector position *x*<sub>e</sub> *= 15*, *y*<sub>e</sub> *= 20* and its orientation, *γ = 85*.
<center>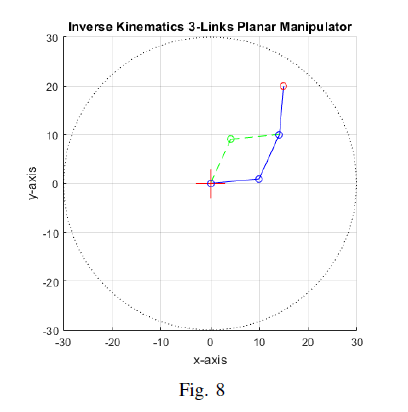
</center>
We validate the result by substituting the values to *fkinematics* and in Matlab console, run
```
fkinematics(10,10,10,5.455,59.876,19.669)
```
This gives us an end-effector position equal to *x*<sub>e</sub> *= 15.000024* and *y*<sub>e </sub> *= 19.999928*, and orientation equal to *γ = 85*. The joint angles in elbow-up configuration also yield to the same end-effector and orientation.
<center>
</center>
<center>
</center>
Thus, we verified that the inverse kinematics equations which yields to the joint angles.
### **IV. Conclusion**
In this text, we modelled the equations for the forward and inverse kinematics of a 3R planar manipulator as shown in Figure 1. In MATLAB, we wrote a script for the *fkinematics* and *fkinematics* functions. These functions are used to validate the forward and invers kinematics model in the text. The *fkinematics* function returns the end-effector position *P* and its orientation *γ*. The result of fkinematics is validate by using its result as an input to ikinematics function. On the contrary, the ikinematics function returns the join angles θ<sub>1</sub>, θ<sub>2</sub> and θ<sub>3</sub>. We cross-validate the joint angles by setting it as an input to the fkinematic function.
Thus, the forward and inverse kinematics model yield to correct values for the end-effector position and its orientation, and the joint angles. Also, the joint angles, either elbow-up and elbow-down configuration, in the inverse kinematics model gives the same end-effector point and orientation when cross-validated.
### **V. References**
[1] [Lynch, K. and F. Park. “Modern Robotics: Mechanics, Planning, and Control.” (2017).](https://www.semanticscholar.org/paper/Modern-Robotics%3A-Mechanics%2C-Planning%2C-and-Control-Lynch-Park/ad094b63ac4c75239a5ea4464ecc79e73efd2fcd)
[2] [John J. Craig. 1989. Introduction to Robotics: Mechanics and Control (2nd. ed.). Addison-Wesley Longman Publishing Co., Inc., USA.](http://www.mech.sharif.ir/c/document_library/get_file?uuid=5a4bb247-1430-4e46-942c-d692dead831f&groupId=14040)
[3] [Merat, Frank. (1987). Introduction to robotics: Mechanics and control. Robotics and Automation, IEEE Journal of. 3. 166 - 166. 10.1109/JRA.1987.1087086](https://www.researchgate.net/publication/224729839_Introduction_to_robotics_Mechanics_and_control)
(Note: All images in the text are personally drawn by the author except those with citations. )
Posted with [STEMGeeks](https://stemgeeks.net)
Posted with [STEMGeeks](https://stemgeeks.net)| author | juecoree |
|---|---|
| permlink | forward-and-reverse-kinematics-for-3r-planar-manipulator |
| category | hive-196387 |
| json_metadata | {"app":"stemgeeks/0.1","format":"markdown","image":["https://images.hive.blog/DQmSTDUW4WRXz4U8Dyfr9EneNjB48w6iZFasoTaEc1nnmda/image.png"],"tags":["stemgeeks","engineering","science","ocd","programming","technology","nerday","stem"],"links":["https://www.semanticscholar.org/paper/Modern-Robotics%3A-Mechanics%2C-Planning%2C-and-Control-Lynch-Park/ad094b63ac4c75239a5ea4464ecc79e73efd2fcd"]} |
| created | 2020-12-21 02:53:09 |
| last_update | 2020-12-26 09:52:30 |
| depth | 0 |
| children | 1 |
| last_payout | 2020-12-28 02:53:09 |
| cashout_time | 1969-12-31 23:59:59 |
| total_payout_value | 4.474 HBD |
| curator_payout_value | 4.446 HBD |
| pending_payout_value | 0.000 HBD |
| promoted | 0.000 HBD |
| body_length | 14,354 |
| author_reputation | 183,725,276,504,013 |
| root_title | "Forward and Reverse Kinematics for 3R Planar Manipulator" |
| beneficiaries | [] |
| max_accepted_payout | 1,000,000.000 HBD |
| percent_hbd | 10,000 |
| post_id | 101,031,703 |
| net_rshares | 44,757,683,883,193 |
| author_curate_reward | "" |
| voter | weight | wgt% | rshares | pct | time |
|---|---|---|---|---|---|
| simba | 0 | 2,639,553,558 | 4.22% | ||
| tuck-fheman | 0 | 967,841,601 | 4.22% | ||
| drifter1 | 0 | 1,859,287,132 | 4.22% | ||
| modeprator | 0 | 565,950,102 | 75% | ||
| chris4210 | 0 | 570,434,775 | 4.22% | ||
| scalextrix | 0 | 2,207,113,887 | 4.22% | ||
| justtryme90 | 0 | 2,659,518,229 | 65% | ||
| eric-boucher | 0 | 18,224,701,686 | 4.22% | ||
| thecryptodrive | 0 | 18,104,052,213 | 1.69% | ||
| mammasitta | 0 | 26,037,690,784 | 4.22% | ||
| skapaneas | 0 | 1,402,694,624 | 19.5% | ||
| roelandp | 0 | 750,821,644,010 | 32.5% | ||
| matt-a | 0 | 639,872,204 | 1.5% | ||
| onthewayout | 0 | 606,921,003,018 | 100% | ||
| diana.catherine | 0 | 1,003,485,665 | 4.22% | ||
| nascimentoab | 0 | 563,842,818 | 4.22% | ||
| arcange | 0 | 108,166,705,069 | 2% | ||
| lichtblick | 0 | 4,631,160,052 | 2.53% | ||
| liberosist | 0 | 17,211,606,678 | 4.22% | ||
| raphaelle | 0 | 2,101,528,999 | 2% | ||
| joshglen | 0 | 903,092,037 | 8.45% | ||
| psygambler | 0 | 554,639,300 | 4.22% | ||
| kpine | 0 | 1,972,515,340,498 | 10% | ||
| rubenalexander | 0 | 3,431,826,798 | 1.69% | ||
| lemouth | 0 | 1,168,735,682,843 | 65% | ||
| notconvinced | 0 | 35,596,189,769 | 65% | ||
| charlie777pt | 0 | 1,770,981,466 | 5% | ||
| alaqrab | 0 | 5,233,695,221 | 4.22% | ||
| amr008 | 0 | 10,051,949,014 | 100% | ||
| lamouthe | 0 | 5,418,966,573 | 65% | ||
| uwelang | 0 | 47,786,187,815 | 4.22% | ||
| tfeldman | 0 | 8,199,030,531 | 4.22% | ||
| mcsvi | 0 | 121,166,876,819 | 50% | ||
| lk666 | 0 | 4,278,495,560 | 4.22% | ||
| cnfund | 0 | 3,222,483,188 | 4.22% | ||
| michelle.gent | 0 | 4,311,654,883 | 1.69% | ||
| curie | 0 | 1,850,922,221,284 | 8.45% | ||
| modernzorker | 0 | 4,482,215,029 | 5.91% | ||
| reddust | 0 | 12,768,828,437 | 2.53% | ||
| techslut | 0 | 145,709,522,277 | 26% | ||
| jaki01 | 0 | 4,053,021,444,843 | 100% | ||
| slider2990 | 0 | 1,591,573,887 | 45% | ||
| steemstem | 0 | 6,765,339,256,904 | 65% | ||
| dashfit | 0 | 879,105,580 | 4.22% | ||
| zorg67 | 0 | 617,041,654 | 100% | ||
| yadamaniart | 0 | 2,910,746,303 | 4.22% | ||
| apsu | 0 | 5,383,608,821 | 2.95% | ||
| walterjay | 0 | 197,405,224,431 | 32.5% | ||
| valth | 0 | 8,180,722,994 | 32.5% | ||
| lastminuteman | 0 | 1,912,301,358 | 2.95% | ||
| driptorchpress | 0 | 4,039,091,974 | 4.22% | ||
| voter | 0 | 62,667,763 | 100% | ||
| kobold-djawa | 0 | 240,876,997,002 | 100% | ||
| rahul.stan | 0 | 2,602,575,055 | 2.95% | ||
| dna-replication | 0 | 18,602,446,438 | 65% | ||
| ambyr00 | 0 | 1,796,353,119 | 1.26% | ||
| gmedley | 0 | 1,804,592,464 | 4.22% | ||
| nasgu | 0 | 610,155,420 | 8.45% | ||
| dhimmel | 0 | 1,132,608,149,176 | 16.25% | ||
| chasmic-cosm | 0 | 1,111,167,169 | 4.22% | ||
| luisreyes | 0 | 674,142,033 | 4.22% | ||
| dickturpin | 0 | 1,346,835,334 | 4.22% | ||
| davidorcamuriel | 0 | 2,802,187,030,853 | 100% | ||
| thatsweeneyguy | 0 | 912,184,486 | 4.22% | ||
| bloom | 0 | 199,814,294,065 | 65% | ||
| federacion45 | 0 | 15,847,623,924 | 4.22% | ||
| kingkinslow | 0 | 546,300,110 | 4.22% | ||
| mobbs | 0 | 116,569,972,958 | 32.5% | ||
| jagged | 0 | 1,616,195,304 | 1.69% | ||
| roomservice | 0 | 116,199,542,003 | 4.22% | ||
| cacalillos | 0 | 2,627,801,461 | 2.53% | ||
| farizal | 0 | 9,416,909,785 | 39% | ||
| sustainablyyours | 0 | 3,669,375,406 | 4.22% | ||
| erick1 | 0 | 2,737,985,557 | 4.22% | ||
| yehey | 0 | 181,993,156,934 | 8.45% | ||
| freetissues | 0 | 1,822,930,343 | 4.22% | ||
| samminator | 0 | 67,767,459,889 | 65% | ||
| zerotoone | 0 | 1,685,319,425 | 4.22% | ||
| kalinka | 0 | 1,648,961,218 | 4.22% | ||
| mahdiyari | 0 | 631,868,220,901 | 80% | ||
| lorenzor | 0 | 7,651,075,724 | 50% | ||
| firstamendment | 0 | 53,342,783,911 | 50% | ||
| aboutyourbiz | 0 | 1,621,208,901 | 8.45% | ||
| alexander.alexis | 0 | 39,304,146,708 | 65% | ||
| spectrumecons | 0 | 2,210,732,051,676 | 45% | ||
| jayna | 0 | 6,178,907,104 | 1.69% | ||
| hhayweaver | 0 | 3,107,482,355 | 4.22% | ||
| finkistinger | 0 | 1,158,140,245 | 4.22% | ||
| liuke96player | 0 | 829,945,010 | 4.22% | ||
| gunthertopp | 0 | 119,850,406,406 | 2.11% | ||
| pipiczech | 0 | 1,863,087,726 | 4.22% | ||
| pisolutionsmru | 0 | 1,178,328,204 | 4.22% | ||
| binkyprod | 0 | 3,231,682,814 | 4.22% | ||
| ludmila.kyriakou | 0 | 3,264,923,625 | 19.5% | ||
| toofasteddie | 0 | 131,144,324,062 | 30% | ||
| edkarnie | 0 | 369,528,428,240 | 100% | ||
| flatman | 0 | 6,486,024,237 | 8.45% | ||
| samest | 0 | 826,132,738 | 29.5% | ||
| minnowbooster | 0 | 1,795,863,900,565 | 20% | ||
| howo | 0 | 2,381,004,070,821 | 65% | ||
| tsoldovieri | 0 | 6,616,056,387 | 32.5% | ||
| neumannsalva | 0 | 4,183,654,516 | 4.22% | ||
| stayoutoftherz | 0 | 86,090,113,381 | 4.22% | ||
| abigail-dantes | 0 | 24,490,996,136 | 65% | ||
| sciencevienna | 0 | 24,697,275,955 | 35.75% | ||
| khalil319 | 0 | 894,873,226 | 10% | ||
| prapanth | 0 | 603,090,932 | 4.22% | ||
| redrica | 0 | 5,085,085,609 | 4.22% | ||
| endracsho | 0 | 30,471,995,707 | 100% | ||
| appleskie | 0 | 1,956,106,892 | 5.91% | ||
| iamphysical | 0 | 7,936,906,247 | 90% | ||
| felixrodriguez | 0 | 1,284,378,913 | 32.5% | ||
| chrisdavidphoto | 0 | 1,461,200,451 | 2.53% | ||
| pearlumie | 0 | 762,193,724 | 4.22% | ||
| gabox | 0 | 592,346,525 | 0.42% | ||
| betterthanhome | 0 | 17,966,194,137 | 8.45% | ||
| revo | 0 | 31,989,307,038 | 8.45% | ||
| azulear | 0 | 5,872,425,107 | 100% | ||
| stickchumpion | 0 | 1,849,635,846 | 4.22% | ||
| noloafing | 0 | 4,256,905,188 | 16.25% | ||
| thelordsharvest | 0 | 12,284,314,810 | 8.45% | ||
| kimzwarch | 0 | 11,267,548,088 | 4% | ||
| olusolaemmanuel | 0 | 1,091,202,385 | 5.91% | ||
| bradfordtennyson | 0 | 5,048,679,980 | 4.22% | ||
| trevorpetrie | 0 | 3,609,171,519 | 4.22% | ||
| torico | 0 | 2,060,210,328 | 2.78% | ||
| mballesteros | 0 | 3,384,814,496 | 4.22% | ||
| minnowpowerup | 0 | 1,248,360,247 | 4.22% | ||
| revisesociology | 0 | 11,727,410,345 | 0.84% | ||
| yangyanje | 0 | 8,508,676,009 | 4.22% | ||
| superdavey | 0 | 666,894,145 | 3.16% | ||
| diosarich | 0 | 533,821,555 | 4.22% | ||
| derekvonzarovich | 0 | 689,954,141 | 4.22% | ||
| cryptononymous | 0 | 2,647,846,058 | 4.22% | ||
| braveboat | 0 | 2,464,445,738 | 8% | ||
| meno | 0 | 87,382,974,202 | 4.22% | ||
| buttcoins | 0 | 5,790,725,689 | 1.69% | ||
| hanggggbeeee | 0 | 1,572,107,557 | 4.22% | ||
| steemed-proxy | 0 | 1,292,075,651,329 | 7.18% | ||
| fatkat | 0 | 2,267,365,609 | 4.22% | ||
| peaceandwar | 0 | 1,341,791,908 | 4.22% | ||
| vegoutt-travel | 0 | 27,086,791,119 | 45% | ||
| enzor | 0 | 1,527,932,439 | 32.5% | ||
| marcoriccardi | 0 | 1,339,683,770 | 8.45% | ||
| tazbaz | 0 | 823,359,330 | 4.22% | ||
| spencercoffman | 0 | 1,088,999,292 | 1.69% | ||
| florian-glechner | 0 | 4,247,400,895 | 0.84% | ||
| carloserp-2000 | 0 | 18,587,362,851 | 100% | ||
| lays | 0 | 1,463,130,249 | 4.22% | ||
| amritadeva | 0 | 2,421,052,124 | 4.22% | ||
| lottje | 0 | 556,121,790 | 65% | ||
| gra | 0 | 5,814,342,726 | 65% | ||
| postpromoter | 0 | 2,867,380,500,604 | 65% | ||
| diverse | 0 | 4,573,462,024 | 4.22% | ||
| omstavan | 0 | 7,912,027,462 | 100% | ||
| bluefinstudios | 0 | 1,524,069,852 | 2.53% | ||
| steveconnor | 0 | 5,447,258,719 | 4.22% | ||
| sankysanket18 | 0 | 76,266,441,734 | 32.5% | ||
| nicole-st | 0 | 834,474,916 | 4.22% | ||
| teukurival | 0 | 712,385,763 | 4.22% | ||
| drmake | 0 | 4,850,028,100 | 4.22% | ||
| cataluz | 0 | 3,041,838,206 | 4.22% | ||
| ecuaminte | 0 | 769,655,676 | 6.33% | ||
| aboutcoolscience | 0 | 16,150,376,750 | 65% | ||
| pechichemena | 0 | 1,064,664,663 | 1.69% | ||
| amestyj | 0 | 26,143,241,179 | 100% | ||
| mhm-philippines | 0 | 568,961,301 | 4.22% | ||
| itchyfeetdonica | 0 | 14,988,981,970 | 1.69% | ||
| brutledge | 0 | 562,918,276 | 4.22% | ||
| egotheist | 0 | 1,227,695,929 | 6.5% | ||
| kenadis | 0 | 17,717,634,406 | 65% | ||
| esaia.mystic | 0 | 535,272,270 | 8.45% | ||
| madridbg | 0 | 10,592,035,085 | 32.5% | ||
| robotics101 | 0 | 20,013,489,318 | 65% | ||
| marcolino76 | 0 | 817,420,655 | 4.22% | ||
| howiemac | 0 | 755,179,517 | 4.22% | ||
| gentleshaid | 0 | 61,686,181,849 | 59% | ||
| stevenson7 | 0 | 725,848,595 | 4.22% | ||
| thescubageek | 0 | 589,727,183 | 4.22% | ||
| fejiro | 0 | 810,245,461 | 32.5% | ||
| zipsardinia | 0 | 1,841,928,315 | 8.45% | ||
| fourfourfun | 0 | 814,999,814 | 2.88% | ||
| danaedwards | 0 | 1,079,740,521 | 8.45% | ||
| dechastre | 0 | 926,157,073 | 4.22% | ||
| sco | 0 | 52,121,086,038 | 65% | ||
| phgnomo | 0 | 1,099,002,340 | 4.22% | ||
| ennyta | 0 | 983,760,155 | 50% | ||
| stahlberg | 0 | 1,952,255,932 | 4.22% | ||
| gabrielatravels | 0 | 3,438,297,766 | 1.69% | ||
| cordeta | 0 | 1,386,822,362 | 8.45% | ||
| reizak | 0 | 774,210,370 | 3.38% | ||
| vjap55 | 0 | 1,277,091,172 | 100% | ||
| jude.villarta | 0 | 1,398,806,646 | 100% | ||
| eliaschess333 | 0 | 5,456,375,146 | 50% | ||
| shoganaii | 0 | 821,697,495 | 32.5% | ||
| intrepidphotos | 0 | 2,442,996,229,971 | 48.75% | ||
| fineartnow | 0 | 4,920,139,873 | 4.22% | ||
| hijosdelhombre | 0 | 37,323,156,285 | 40% | ||
| bobydimitrov | 0 | 605,786,729 | 6.33% | ||
| shinedojo | 0 | 1,040,394,443 | 8.45% | ||
| fragmentarion | 0 | 14,609,053,780 | 65% | ||
| gaming.yer | 0 | 1,706,385,517 | 100% | ||
| bennettitalia | 0 | 1,946,649,651 | 2.11% | ||
| hadji | 0 | 24,779,870,807 | 100% | ||
| wanderlass | 0 | 967,255,981 | 4.22% | ||
| terrylovejoy | 0 | 12,362,494,930 | 26% | ||
| goldrooster | 0 | 17,009,989,554 | 4.22% | ||
| real2josh | 0 | 605,850,447 | 32.5% | ||
| soufiani | 0 | 6,052,512,723 | 3.38% | ||
| sportscontest | 0 | 5,332,728,032 | 8.45% | ||
| giddyupngo | 0 | 1,385,386,815 | 4.22% | ||
| steepup | 0 | 815,832,189 | 26% | ||
| pandasquad | 0 | 2,205,895,048 | 8.45% | ||
| tobias-g | 0 | 17,561,364,319 | 6.33% | ||
| stemng | 0 | 41,698,419,765 | 59% | ||
| srikandi | 0 | 6,173,128,143 | 100% | ||
| holger80 | 0 | 1,480,995,408,089 | 33% | ||
| kingabesh | 0 | 1,149,450,099 | 29.5% | ||
| miguelangel2801 | 0 | 788,566,255 | 50% | ||
| mproxima | 0 | 1,811,383,541 | 4.22% | ||
| fantasycrypto | 0 | 5,638,491,280 | 4.22% | ||
| didic | 0 | 3,838,409,110 | 4.22% | ||
| careassaktart | 0 | 579,530,427 | 2.53% | ||
| operahoser | 0 | 785,705,260 | 1.26% | ||
| emiliomoron | 0 | 34,721,562,615 | 50% | ||
| beverages | 0 | 17,308,476,434 | 4.22% | ||
| dexterdev | 0 | 2,311,155,399 | 32.5% | ||
| themonkeyzuelans | 0 | 891,220,116 | 4.22% | ||
| verhp11 | 0 | 1,103,250,799 | 1% | ||
| oghie | 0 | 829,845,851 | 50% | ||
| photohunt | 0 | 9,310,384,804 | 8.45% | ||
| geopolis | 0 | 4,285,075,549 | 65% | ||
| robertbira | 0 | 7,014,779,635 | 16.25% | ||
| lintang | 0 | 10,936,193,103 | 100% | ||
| stk-g | 0 | 1,715,891,110 | 8.45% | ||
| the.chiomz | 0 | 641,433,279 | 32.45% | ||
| alexdory | 0 | 78,609,940,637 | 65% | ||
| flugschwein | 0 | 2,000,955,761 | 55.25% | ||
| charitybot | 0 | 4,566,346,268 | 100% | ||
| lightflares | 0 | 2,558,460,181 | 4.22% | ||
| cyprianj | 0 | 12,835,143,024 | 65% | ||
| bertrayo | 0 | 1,020,595,369 | 4.22% | ||
| movement19 | 0 | 1,411,850,839 | 2.5% | ||
| doikao | 0 | 71,606,847,230 | 8.45% | ||
| francostem | 0 | 8,928,317,903 | 65% | ||
| endopediatria | 0 | 692,967,943 | 20% | ||
| forester-joe | 0 | 712,646,867 | 1.5% | ||
| chrislybear | 0 | 12,360,116,876 | 65% | ||
| vicesrus | 0 | 14,156,685,276 | 4.22% | ||
| memeitbaby | 0 | 653,640,791 | 100% | ||
| croctopus | 0 | 1,520,535,442 | 100% | ||
| zipporah | 0 | 4,281,902,240 | 1.69% | ||
| hadley4 | 0 | 779,280,779 | 8.45% | ||
| idkpdx | 0 | 21,083,271 | 4.22% | ||
| superlotto | 0 | 14,783,688,664 | 8.45% | ||
| djoi | 0 | 2,709,177,401 | 29.5% | ||
| norwegianbikeman | 0 | 4,426,101,119 | 5% | ||
| positiveninja | 0 | 1,345,818,773 | 4.22% | ||
| throwbackthurs | 0 | 546,865,764 | 4.22% | ||
| miroslavrc | 0 | 3,344,594,019 | 2.11% | ||
| bscrypto | 0 | 15,634,866,855 | 4.22% | ||
| vonaurolacu | 0 | 2,214,280,719 | 4.22% | ||
| proto26 | 0 | 1,329,900,574 | 8.45% | ||
| tomastonyperez | 0 | 16,950,445,371 | 50% | ||
| marcus0alameda | 0 | 928,201,038 | 50% | ||
| bil.prag | 0 | 2,026,164,340 | 0.42% | ||
| elvigia | 0 | 11,105,267,236 | 50% | ||
| sanderjansenart | 0 | 7,393,315,565 | 4.22% | ||
| vittoriozuccala | 0 | 2,621,055,009 | 4.22% | ||
| adamada | 0 | 448,270,766,579 | 100% | ||
| koenau | 0 | 8,862,201,460 | 4.22% | ||
| qberry | 0 | 4,583,382,481 | 4.22% | ||
| frissonsteemit | 0 | 1,725,557,121 | 4.22% | ||
| lesmouths-travel | 0 | 5,176,392,535 | 65% | ||
| rambutan.art | 0 | 4,216,029,573 | 8.45% | ||
| paragism | 0 | 619,964,684 | 0.42% | ||
| greddyforce | 0 | 2,457,802,413 | 3.12% | ||
| foxon | 0 | 36,433,359,404 | 4.22% | ||
| flyerchen | 0 | 615,560,670 | 4.22% | ||
| braaiboy | 0 | 14,176,757,689 | 6.33% | ||
| blainjones | 0 | 1,504,223,733 | 1.69% | ||
| tonimontana | 0 | 7,628,811,653 | 100% | ||
| c0wtschpotato | 0 | 830,398,758 | 4.22% | ||
| cryptocoinkb | 0 | 10,862,064,958 | 4.22% | ||
| gifty-e | 0 | 620,275,803 | 80% | ||
| de-stem | 0 | 38,578,631,194 | 64.35% | ||
| serylt | 0 | 2,955,924,545 | 63.7% | ||
| gogreenbuddy | 0 | 42,504,094,886 | 37.5% | ||
| misia1979 | 0 | 1,183,698,924 | 4.22% | ||
| josedelacruz | 0 | 9,214,611,274 | 50% | ||
| chairmanlee | 0 | 6,576,053,458 | 1.69% | ||
| bukfast | 0 | 6,431,446,501 | 100% | ||
| lorenzopistolesi | 0 | 560,428,896 | 4.22% | ||
| andrewharland | 0 | 4,234,798,793 | 8.45% | ||
| mariusfebruary | 0 | 38,585,504,321 | 3.38% | ||
| outtheshellvlog | 0 | 1,255,247,300 | 4.22% | ||
| kendallron | 0 | 2,224,904,642 | 100% | ||
| menoski | 0 | 743,986,011 | 29.5% | ||
| meanbees | 0 | 121,438,037,320 | 32.5% | ||
| michaelwrites | 0 | 852,586,651 | 32.5% | ||
| srijana-gurung | 0 | 1,994,933,065 | 4.22% | ||
| promobot | 0 | 9,837,831,507 | 11.55% | ||
| incubot | 0 | 8,782,413,057 | 6.33% | ||
| beco132 | 0 | 628,393,318 | 4.22% | ||
| primersion | 0 | 119,808,133,949 | 50% | ||
| deholt | 0 | 3,735,931,281 | 55.25% | ||
| solominer | 0 | 303,390,323,117 | 10% | ||
| veteranforcrypto | 0 | 2,487,699,864 | 1.85% | ||
| playdice | 0 | 1,175,319,924 | 3.16% | ||
| indayclara | 0 | 2,121,582,995 | 50% | ||
| mightynick | 0 | 1,565,212,319 | 1.69% | ||
| gwilberiol | 0 | 12,965,762,329 | 7.6% | ||
| diabonua | 0 | 1,604,172,491 | 4.22% | ||
| jasuly | 0 | 13,009,553,216 | 100% | ||
| edanya | 0 | 678,158,110 | 4.22% | ||
| nateaguila | 0 | 192,000,252,542 | 5% | ||
| davidesimoncini | 0 | 535,358,550 | 49% | ||
| stevenwood | 0 | 2,612,388,715 | 2.81% | ||
| enforcer48 | 0 | 134,064,718,279 | 15% | ||
| temitayo-pelumi | 0 | 2,352,257,168 | 29.5% | ||
| andrick | 0 | 857,392,467 | 50% | ||
| yusvelasquez | 0 | 13,814,233,191 | 50% | ||
| motherofalegend | 0 | 8,550,849,830 | 32.5% | ||
| doctor-cog-diss | 0 | 2,622,790,572 | 65% | ||
| pinas | 0 | 662,849,856 | 50% | ||
| trisolaran | 0 | 2,265,988,897 | 4.22% | ||
| steemxp | 0 | 631,965,698 | 4.22% | ||
| marcuz | 0 | 2,292,281,350 | 32.5% | ||
| pialejoana | 0 | 1,250,648,179 | 4.22% | ||
| wolfofnostreet | 0 | 1,061,654,802 | 4.22% | ||
| acont | 0 | 49,980,311,061 | 100% | ||
| uche-nna | 0 | 8,375,935,180 | 6.76% | ||
| myfreebtc | 0 | 1,092,641,167 | 6.76% | ||
| lightcaptured | 0 | 8,158,979,436 | 4.22% | ||
| schroders | 0 | 3,434,602,693 | 2.53% | ||
| anaestrada12 | 0 | 21,768,550,470 | 100% | ||
| dzoji | 0 | 1,515,154,028 | 8.45% | ||
| hardaeborla | 0 | 550,431,086 | 4.22% | ||
| council | 0 | 626,269,313 | 8.45% | ||
| cryptocopy | 0 | 728,483,310 | 4.22% | ||
| cheese4ead | 0 | 7,038,526,173 | 4.22% | ||
| ashikstd | 0 | 1,329,320,412 | 1.69% | ||
| longer | 0 | 866,364,069 | 2.11% | ||
| blewitt | 0 | 9,292,010,249 | 0.42% | ||
| drsensor | 0 | 1,409,746,784 | 52% | ||
| soulsdetour | 0 | 1,960,585,057 | 8.45% | ||
| thinkwise | 0 | 1,094,756,905 | 1.69% | ||
| ilovecryptopl | 0 | 1,402,029,418 | 6.76% | ||
| mindblast | 0 | 10,545,622,542 | 4.22% | ||
| lexilee | 0 | 10,043,034,563 | 1.69% | ||
| militaryphoto | 0 | 4,511,056,332 | 1.69% | ||
| urdreamscometrue | 0 | 1,389,589,004 | 100% | ||
| yisunshin | 0 | 5,949,790,318 | 1.69% | ||
| airforce | 0 | 4,642,647,763 | 1.69% | ||
| rokarmy | 0 | 4,142,933,535 | 1.69% | ||
| roknavy | 0 | 1,270,731,478 | 1.69% | ||
| rokairforce | 0 | 51,133,898,030 | 1.69% | ||
| bflanagin | 0 | 3,992,460,828 | 4.22% | ||
| ubaldonet | 0 | 1,831,206,495 | 70% | ||
| armandosodano | 0 | 30,563,550,770 | 4.22% | ||
| melor9 | 0 | 835,653,548 | 4.22% | ||
| sadbear | 0 | 1,570,800,142 | 4.22% | ||
| bestofph | 0 | 23,520,226,961 | 100% | ||
| call-me-howie | 0 | 788,585,702 | 4.22% | ||
| marivic10 | 0 | 807,626,762 | 4.22% | ||
| hansmast | 0 | 689,554,689 | 4.22% | ||
| viruk | 0 | 654,393,765 | 8.45% | ||
| goblinknackers | 0 | 156,260,586,946 | 4% | ||
| zuerich | 0 | 445,943,132,070 | 10% | ||
| jk6276 | 0 | 322,294,694 | 5% | ||
| honeycup-waters | 0 | 832,009,250 | 4.22% | ||
| yaelg | 0 | 1,242,443,705 | 2.53% | ||
| kylealex | 0 | 4,761,515,703 | 10% | ||
| arnilarn | 0 | 594,951,789 | 8.45% | ||
| minimining | 0 | 2,320,830,121 | 4.22% | ||
| loveforlove | 0 | 1,483,513,744 | 59% | ||
| mobi72 | 0 | 654,202,062 | 4.22% | ||
| fran.frey | 0 | 4,172,661,774 | 50% | ||
| perpetuum-lynx | 0 | 1,947,575,060 | 63.7% | ||
| fullnodeupdate | 0 | 11,697,589,198 | 33% | ||
| pboulet | 0 | 37,135,584,658 | 32.5% | ||
| marcocasario | 0 | 17,036,197,530 | 4.22% | ||
| stem-espanol | 0 | 84,037,084,533 | 100% | ||
| aleestra | 0 | 15,289,152,545 | 80% | ||
| the.success.club | 0 | 3,232,312,742 | 4.22% | ||
| chickenmeat | 0 | 1,759,706,759 | 4.22% | ||
| javier.dejuan | 0 | 3,817,813,379 | 65% | ||
| meanroosterfarm | 0 | 13,489,669,130 | 32.5% | ||
| tommyl33 | 0 | 1,132,021,018 | 4.22% | ||
| brianoflondon | 0 | 15,845,398,942 | 1.26% | ||
| reverseacid | 0 | 842,739,186 | 4.22% | ||
| giulyfarci52 | 0 | 1,705,588,619 | 50% | ||
| esthersanchez | 0 | 7,543,280,361 | 60% | ||
| monkaydee293 | 0 | 632,392,051 | 4.22% | ||
| alvin0617 | 0 | 763,989,054 | 4.22% | ||
| cowpatty | 0 | 1,327,274,223 | 32.5% | ||
| stem.witness | 0 | 201,207,624,190 | 65% | ||
| autobodhi | 0 | 888,485,224 | 8.45% | ||
| samks | 0 | 528,349,011 | 4.22% | ||
| robmojo | 0 | 971,841,124 | 0.42% | ||
| wilmer14molina | 0 | 2,657,770,850 | 50% | ||
| vaultec | 0 | 3,009,489,957 | 12% | ||
| aqua.nano | 0 | 5,148,630,622 | 32.5% | ||
| steemegg | 0 | 816,168,555 | 2.11% | ||
| navyactifit | 0 | 74,268,422,738 | 3.38% | ||
| jtm.support | 0 | 4,831,531,485 | 65% | ||
| topoisomerase | 0 | 13,421,073,593 | 100% | ||
| crowdwitness | 0 | 30,967,060,908 | 32.5% | ||
| baasdebeer | 0 | 840,037,696 | 6.33% | ||
| hairgistix | 0 | 4,292,992,688 | 4.22% | ||
| rem-steem | 0 | 3,134,187,389 | 1.69% | ||
| cooperfelix | 0 | 1,547,446,971 | 15% | ||
| limka | 0 | 86,037,471 | 100% | ||
| ava77 | 0 | 559,283,789 | 5.91% | ||
| bluemaskman | 0 | 838,143,615 | 4.22% | ||
| cryptological | 0 | 1,256,234,390 | 4.22% | ||
| afternoondrinks | 0 | 863,252,290 | 6.33% | ||
| proxy-pal | 0 | 1,403,639,682 | 7.18% | ||
| breakout101 | 0 | 1,026,145,824 | 4.22% | ||
| steem-queen | 0 | 5,598,368,635 | 100% | ||
| kggymlife | 0 | 5,752,741,595 | 20% | ||
| cryptofiloz | 0 | 17,456,938,775 | 8.45% | ||
| ilanisnapshots | 0 | 547,093,588 | 6.33% | ||
| filosof103 | 0 | 1,817,054,090 | 4.22% | ||
| elements5 | 0 | 2,365,784,743 | 4.22% | ||
| rocketpower | 0 | 547,518,847 | 22.5% | ||
| epicdice | 0 | 17,862,513,398 | 2.53% | ||
| iamsaray | 0 | 1,934,768,240 | 4.22% | ||
| endersong | 0 | 889,239,938 | 8.45% | ||
| pearltwin | 0 | 4,861,095,178 | 1.69% | ||
| scholaris | 0 | 29,922,114,452 | 16.25% | ||
| miniteut | 0 | 675,068,922 | 32.5% | ||
| yourfuture | 0 | 2,566,236,943 | 45.5% | ||
| fractalfrank | 0 | 13,610,561,921 | 4.22% | ||
| likwid | 0 | 26,979,730,497 | 11.55% | ||
| afarina46 | 0 | 1,794,905,377 | 32.5% | ||
| titan-c | 0 | 3,042,535,204 | 8.45% | ||
| waraira777 | 0 | 589,741,749 | 32.5% | ||
| shimozurdo | 0 | 320,985,878 | 4.22% | ||
| mind.force | 0 | 1,334,017,553 | 2.11% | ||
| reggaesteem | 0 | 538,282,466 | 5% | ||
| stemgeeks | 0 | 15,125,747,396 | 75% | ||
| freddio.sport | 0 | 6,710,450,790 | 50% | ||
| stemcuration | 0 | 2,736,001,239 | 75% | ||
| partitura.stem | 0 | 307,064,263 | 100% | ||
| babytarazkp | 0 | 1,105,382,892 | 40% | ||
| liambu | 0 | 2,413,795,803 | 32.5% | ||
| abh12345.stem | 0 | 774,376,134 | 100% | ||
| nazer | 0 | 4,555,515,122 | 32.5% | ||
| rosana6 | 0 | 997,241,258 | 4.22% | ||
| stemd | 0 | 305,350,816 | 100% | ||
| joshmania | 0 | 19,727,682,581 | 16.25% | ||
| steemstem-trig | 0 | 5,051,895,576 | 65% | ||
| herzinfuck | 0 | 3,852,673,750 | 4.22% | ||
| yggdrasil.laguna | 0 | 363,495,797 | 75% | ||
| efathenub | 0 | 1,910,020,387 | 8.45% | ||
| ibt-survival | 0 | 38,412,676,975 | 10% | ||
| bella.bear | 0 | 1,761,818,746 | 4.22% | ||
| toni.curation | 0 | 0 | 1% | ||
| delilhavores | 0 | 2,716,562,908 | 6.5% | ||
| pavelsku | 0 | 2,636,438,724 | 4.22% | ||
| hjmarseille | 0 | 6,765,622,170 | 45.5% | ||
| roamingsparrow | 0 | 4,441,037,132 | 6.33% | ||
| burnleoburn | 0 | 63,774,481 | 100% | ||
| gloriaolar | 0 | 4,115,603,512 | 4.22% | ||
| mengene | 0 | 3,168,523,622 | 32.5% | ||
| almightymelon | 0 | 932,489,850 | 4.22% | ||
| stuntman.mike | 0 | 42,671,164,527 | 100% | ||
| fengchao | 0 | 8,996,689,216 | 2% | ||
| solcycler | 0 | 812,473,135 | 32.5% | ||
| laruche | 0 | 27,532,286,066 | 0.6% | ||
| hiveyoda | 0 | 2,419,938,891 | 99% | ||
| hornetsnest | 0 | 8,025,865,696 | 4.22% | ||
| alphahippie | 0 | 761,267,856 | 32.5% | ||
| stemsocial | 0 | 13,307,270,396 | 65% | ||
| captainhive | 0 | 846,242,067,367 | 45% | ||
| peterpanpan | 0 | 2,077,968,382 | 1.69% | ||
| quello | 0 | 2,028,286,587 | 6.33% | ||
| gradeon | 0 | 815,444,504 | 8.45% | ||
| hiveonboard | 0 | 6,632,534,680 | 4.22% | ||
| hive-143869 | 0 | 688,524,539 | 0.6% | ||
| ninnu | 0 | 1,802,049,564 | 0.42% | ||
| heystack | 0 | 1,776,778,631 | 100% | ||
| rihc94 | 0 | 1,107,692,408 | 4.22% | ||
| shinyrygaming | 0 | 3,006,576,020 | 32.5% | ||
| danielapevs | 0 | 1,110,666,383 | 4.22% | ||
| hive-101493 | 0 | 2,443,533,900 | 32.5% | ||
| recoveryinc | 0 | 47,013,968,095 | 5% | ||
| spirall | 0 | 828,264,026 | 4.22% | ||
| dying | 0 | 9,656,620,852 | 10% | ||
| jpvmoney | 0 | 1,577,534,636 | 4.22% | ||
| bitcome | 0 | 810,638,111 | 32.5% | ||
| pfwaus | 0 | 1,398,911,665 | 100% | ||
| gonklavez9 | 0 | 643,055,748 | 65% | ||
| dorkpower | 0 | 3,257,144,137 | 100% | ||
| chucknun | 0 | 977,036,446 | 2.11% | ||
| joshuabbey | 0 | 534,228,647 | 4.22% | ||
| lowlightart | 0 | 1,358,713,204 | 5.07% | ||
| shroomfund | 0 | 26,685,837,301 | 100% | ||
| cosplay.hadr | 0 | 1,060,085,949 | 4.22% | ||
| hadrgames | 0 | 1,105,615,860 | 4.22% | ||
| maar | 0 | 934,285,432 | 65% | ||
| joey1989 | 0 | 812,117,785 | 4.22% | ||
| brofund-stem | 0 | 2,010,295,624 | 75% | ||
| rikarivka | 0 | 2,485,117,559 | 100% | ||
| nathen007.stem | 0 | 642,300,275 | 100% | ||
| sillybilly | 0 | 63,630,446 | 65% | ||
| meestemboom | 0 | 1,155,340,201 | 37.5% | ||
| academiccuration | 0 | 784,259,949 | 100% | ||
| emrebeyler.stem | 0 | 1,716,497,284 | 100% | ||
| nerday.com | 0 | 45,354,466 | 4% | ||
| jack4all | 0 | 1,748,423,009 | 50% | ||
| juecostudio | 0 | 0 | 100% |
<div class='text-justify'> <div class='pull-left'> <img src='https://stem.openhive.network/images/stemsocialsupport7.png'> </div> Thanks for your contribution to the STEMsocial community. Feel free to join us on discord to get to know the rest of us! Please consider <a href="https://hivesigner.com/sign/update-proposal-votes?proposal_ids=%5B91%5D&approve=true">supporting our funding proposal</a>, <a href="https://hivesigner.com/sign/account_witness_vote?approve=1&witness=stem.witness">approving our witness</a> (@stem.witness) or delegating to the @stemsocial account (for some ROI). Please consider using the <a href='https://stem.openhive.network'>STEMsocial app</a> app and including @stemsocial as a beneficiary to get a stronger support. <br /> <br />
| author | steemstem |
|---|---|
| permlink | re-juecoree-forward-and-reverse-kinematics-for-3r-planar-manipulator-20201222t214734867z |
| category | hive-196387 |
| json_metadata | {"app":"stemsocial"} |
| created | 2020-12-22 21:47:36 |
| last_update | 2020-12-22 21:47:36 |
| depth | 1 |
| children | 0 |
| last_payout | 2020-12-29 21:47:36 |
| cashout_time | 1969-12-31 23:59:59 |
| total_payout_value | 0.000 HBD |
| curator_payout_value | 0.000 HBD |
| pending_payout_value | 0.000 HBD |
| promoted | 0.000 HBD |
| body_length | 778 |
| author_reputation | 262,017,435,115,313 |
| root_title | "Forward and Reverse Kinematics for 3R Planar Manipulator" |
| beneficiaries | [] |
| max_accepted_payout | 1,000,000.000 HBD |
| percent_hbd | 10,000 |
| post_id | 101,053,372 |
| net_rshares | 0 |